March 18th - 22nd
March 18th - 22nd
In Cooperation with
the German Association for Electrical, Electronic and Information Technologies: VDE

![]()
![]()
In Cooperation with
the German Association for Electrical, Electronic and Information Technologies: VDE
Exhibitors and Supporters
Diamond
National Science Foundation
Gold

VICON

Digital Projection
Gold Awards

NVIDIA
Silver

ART
Bronze

Haption

MiddleVR
VR-ON
VISCON
BARCO
Ultrahaptics

WorldViz
Disney Research

Microsoft
Non-Profit
Computer Network Information Center
Sponsor for Research Demo

KUKA
Other Sponsors
Magic Leap
Exhibitors and Supporters
Research Demos please fill out this form by Feb. 28th:
http://www.stephandelarosa.de/limesurvey/index.php/993625?lang=en
In-Car 6-DoF Mixed Reality for Rear-Seat and Co-Driver Entertainment
 Jonas Haeling, Christian Winkler, Stephan Leenders, Daniel Ke§elheim, Axel Hildebrand, Marc Necker
Jonas Haeling, Christian Winkler, Stephan Leenders, Daniel Ke§elheim, Axel Hildebrand, Marc Necker
Daimler AG
Abstract: Conventional VR tracking methods inside a driving vehicle fail out-of-the-box. We present two novel tracking solutions for experiencing a virtual scene on a head-mounted display in a moving vehicle. We leverage advanced vehicle positioning via sensor fusion of existing car sensors to extract an accurate vehicle pose, which we use to mirror car movements virtually. For 6-DoF head-tracking, we exploit IMU-only tracking for two separate approaches - with and without additional hardware. The virtual car, in which the demo user is situated, moves in a virtual urban scene with diverse and appealing VR scenery generated from real world map data.
Game Room Map Integration in Virtual Environments for Free Walking
 Marilyn Keller, Frederic Exposito
Marilyn Keller, Frederic Exposito
Gfi Informatique
Abstract: While current tracking systems now enable real walking in a virtual scene with a Head Mounted Display (HMD), the play area usually remains limited because of tracking limits and the lack of free space in the game room. We demonstrate how to use an RGB-D sensor to increase the playable surface by dynamically acquiring a map of the actual game room and integrating it into the virtual environment. Our system was designed to be integrable to any virtual environment and aims to enable free walking with an HMD by showing the position of the real obstacles to the user.
A Virtual Reality Simulator to Detect Acrophobia in Work-at-Height Situations
 Jean-Remy Chardonnet, Cedric Di Loreto, Julien Ryard, Alain Rousseau
Jean-Remy Chardonnet, Cedric Di Loreto, Julien Ryard, Alain Rousseau
LISPEN, Arts et Metiers, HESAM, Universite Bourgogne Franche-Comte, Institut Image, France
Abstract: We propose to demonstrate a novel immersive virtual reality simulator aimed at detecting whether potential workers at height are able to climb high up for dangerous operations. Our simulator consists in a dynamic platform that simulates the vibrations of an aerial device during elevation, a real ladder synchronized in position with a virtual one placed on top of a virtual electric pole, a harness that allows users safely climbing the ladder and a head-mounted display for visualization. Our demonstration invites users to experience a high fidelity work-at-height situation triggering fear of heights.
Demonstration of Gaze-aware Video Streaming Solutions for Mobile VR
 Saeik Firdose, Pietro Lungaro, Konrad Tollmar
Saeik Firdose, Pietro Lungaro, Konrad Tollmar
Mobile Service Laboratory Department of Communication Systems Royal Institute of Technology (KTH)
Abstract: This demo features an embodiment of SEEN, a novel content delivery method for optimizing the provision of 360_ video streaming. SEEN relies on eye-gaze information from connected eye trackers to provide high quality, in real-time, in the proximity of the estimated fixations points, while lowering bandwidth at the periphery of the userÕs fields of view. The goal is to exploit the characteristics of the human vision to reduce the bandwidth required for the mobile provision of future data intensive services in VR. This demo provides a tangible experience of the tradeoffs among bandwidth consumption, RTT and QoE associated with SEEN.
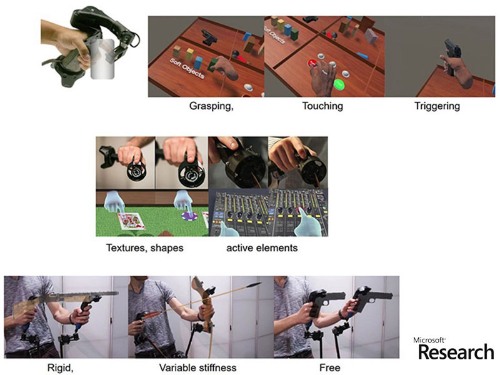
Three Haptic Shape-Feedback Controllers for Virtual Reality
 Mike Sinclair, Eyal Ofek, Christian Holz, Inrak Choi, Eric Whitmire, Evan Strasnick, Hrvoje Benko
Mike Sinclair, Eyal Ofek, Christian Holz, Inrak Choi, Eric Whitmire, Evan Strasnick, Hrvoje Benko
Microsoft Research
Abstract: Haptic output on current AR/VR controllers is limited to vi-brotactile feedback. We present three novel haptic controllers that produce realistic haptic rendering: CLAW augments controller functionality with force feedback and actuated movement, enabling three distinct interactions: grasping, touching, and triggering. Haptic RevolverÕs actuated wheel raises and lowers underneath the userÕs finger to render contact with a virtual surface, and spins to render motion. Interchangeable wheels thereby render physical textures, shapes, or active elements, to the user. Haptic Links are an electro-mechanically actuated physical connections that render variable stiffness between two handheld controllers and thus support a variety of two-handed interactions.
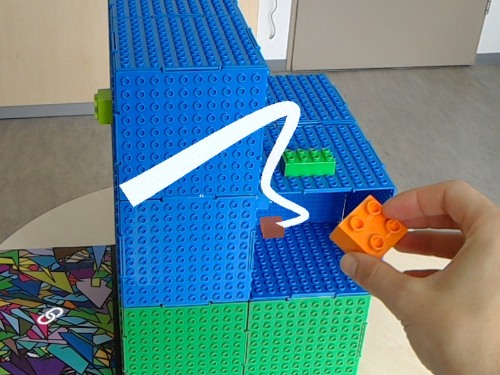
Attention Guiding using Augmented Reality in Complex Environments
 Patrick Renner, Thies Pfeiffer
Patrick Renner, Thies Pfeiffer
Center of Excellence Cognitive Interaction Technology, Bielefeld University, Germany
Abstract: The localization of objects in an environment is an essential task relevant for many work processes. An AR-based assistance system may support users by guiding their attention towards relevant targets, reducing the time needed for visual search as well as errors. We developed a number of new attention guiding techniques and evaluated them in several experiments together with existing techniques in varying scenarios. In our current work, we investigated guiding techniques in a more complex environment including occlusions. In the research demo, a number of visual and acoustic guiding techniques can be tested and combined on the Microsoft HoloLens.
Multisensory Virtual Reality Exposure Therapy
 Alexander Marquardt, Christina Trepkowski, Jens Maiero,, Ernst Kruijff, , Andre Hinkenjann
Alexander Marquardt, Christina Trepkowski, Jens Maiero,, Ernst Kruijff, , Andre Hinkenjann
Institute of Visual Computing, Bonn-Rhein-Sieg University of Applied Sciences, Germany
Abstract: In this research demo, we show examples for the integration of multisensory cues to enhance user engagement and trigger emotional responses in immersive environments. Our primary focus is to use this modular-designed system for the supportive treatment of anxiety disorders. This is achieved by the integration of different devices to provide a range of sensory cues (visual, auditory, vibrotactile, olfactory) and the use of head mounted display technologies. Furthermore, we show how the system works based on three different scenarios for potential therapeutic application.
A Virtual Hip Replacement Surgery Simulator with Realistic Haptic Feedback
 Maximilian Kaluschke, Rene Weller, Gabriel Zachmann, Luigi Pelliccia, Mario Lorenz, Philipp Klimant, Johannes P. G. Atze, Falk Mockel _
Maximilian Kaluschke, Rene Weller, Gabriel Zachmann, Luigi Pelliccia, Mario Lorenz, Philipp Klimant, Johannes P. G. Atze, Falk Mockel _
University of Bremen, Germany
Abstract: Hip replacement is one of the most common surgical procedures. The success rate of this operation depends mainly on the surgeonÕs experience; even small deviations in the acetabular reaming can lead to painful dislocations. This procedure is hard to learn because the surgeon does not see where and how he mills, but he only feels it. We present the first VR training simulator for this challenging process. The core of our system is a new approach for haptic rendering of high and stable forces while simultaneously providing a very sensitive feedback.
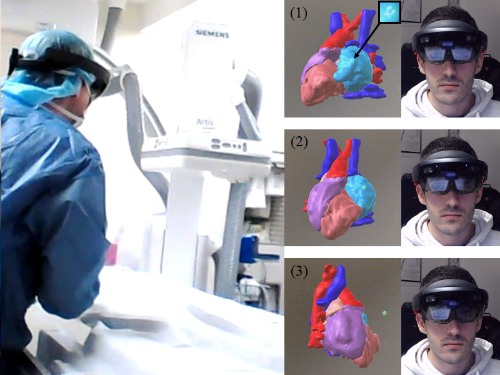
Hands-Free Interaction for Augmented Reality in Vascular Interventions
 Alon Grinshpoon, Shirin Sadri, Gabrielle J. Loeb, Carmine Elvezio, Steven K. Feiner
Alon Grinshpoon, Shirin Sadri, Gabrielle J. Loeb, Carmine Elvezio, Steven K. Feiner
Columbia University, USA
Abstract: Vascular interventions are minimally invasive procedures that require physicians to navigate instruments through patient vasculature. Since perception of patient anatomy is limited, augmented reality systems have been developed to assist with 3D navigation. User interaction in these systems can be constrained by the physicianÕs hands being occupied intraoperatively. We demonstrate hands-free interaction techniques that use voice and head tracking to interact with 3D virtual content on a head-worn display, leaving both hands available to perform procedures. Our approach supports rotation and scaling of anatomical models through small head rotations using first-order control, and rigid body transformation using zero-order control.
Cliffhanger-VR
 Marcel Tiator, Ben Fischer, Laurin Gerhardt, David Nowottnik, Hendrik Preu, Christian Geiger
Marcel Tiator, Ben Fischer, Laurin Gerhardt, David Nowottnik, Hendrik Preu, Christian Geiger
University of Applied Sciences Dusseldorf, Germany
Abstract: The performance and security in outdoor climbing sports can depend on anxieties. These appear in frightening situations where, e.g. a deep fall is risked. Deep falls can lead to serious injuries or even to fatal accidents. Such situations can be trained in order to be mentally resistant to them and to make climbing safer. However, the trainee has to bring himself in a possible hazardous situation. Thus a user can climb with our system at low heights in reality and simultaneously on a high cliff in VR, such that stressful outdoor climbing situations can be trained safely indoors.
HangerOVER: Development of HMD-Embedded Haptic Display Using the Hanger Reflex and VR application
 Yuki Kon, Takuto Nakamura, Rei Sakurag, Hirotaka Shionoiri, Vibol Yem, and Hiroyuki Kajimoto
Yuki Kon, Takuto Nakamura, Rei Sakurag, Hirotaka Shionoiri, Vibol Yem, and Hiroyuki Kajimoto
The University of Electro-Communications, Japan
Abstract: The Hanger Reflex is a phenomenon in which the head rotates unintentionally when it is sandwiched by a wire hanger. The reflex is effectively generated by pressing on specific points, and can be reproduced by pressing with an actuator. We propose the HangerOVER, an HMD-embedded haptic display that can provide both force and motion senses using the Hanger Reflex. In this paper, we designed HangerOVER that HMD-embedded force and motion display using the Hanger Reflex, and developed four VR applications for demonstration.
Softness-Hardness and Stickiness Feedback using Electrical Stimulation while Touching a Virtual Object
 Vibol Yem, Kevin Vu, Yuki Kon, and Hiroyuki Kajimoto
Vibol Yem, Kevin Vu, Yuki Kon, and Hiroyuki Kajimoto
The University of Electro-Communications, Tokyo, Japan.
Abstract: With the advantages of small size and light weight, electrical stimulation devices have been investigated for providing haptic feedback in relation to virtual objects. In our study, we tested a new method for inducing electrical force sensation in the fingertip, presenting haptic feedback designed to alter softness, hardness and stickiness perception. We developed a 3D virtual reality system that can provide visual feedback and the sensation of illusory force that moved the index finger by forward-flexion or backward-extension using tendon or cathodic stimulation. In the demo, participants can experience the sensation of softness, hardness and stickiness of a virtual object.
Redirected Spaces: Going Beyond Borders
 Eike Langbehn, Paul Lubos, Frank Steinicke
Eike Langbehn, Paul Lubos, Frank Steinicke
Human-Computer Interaction, University of Hamburg, Germany
Abstract: Real walking in virtual reality is a promising locomotion technique since it offers multi-modal feedback to the user. Unfortunately, the virtual environment is limited by the available space in the physical world. In this research demonstration, we show how two approaches to overcome this problem can be combined. These are redirected walking and impossible spaces. Redirected walking subtly manipulates the viewpoint of the user to reorient her walking direction. Impossible spaces are based on subtle changes of the environment to reuse the same physical space for different virtual spaces. In particular, for our implementation we focus on the use of curved corridors that benefits both methods.
AnimationVR - Interactive Controller-based Animating in Virtual Reality
 Daniel Vogel, Paul Lubos, Frank Steinicke
Daniel Vogel, Paul Lubos, Frank Steinicke
Human-Computer Interaction, University of Hamburg, Germany
Abstract: Computer generated animations are prevalent in many different domains as film, video games, and education. However, the process of animating with traditional animation software can be tedious and complicated. AnimationVR aims at simplifying animation creation by combining the VR system HTC Vive with the puppeteering animation technique. Instead of defining animations with keyframes, the user can act out the animation with the controllers of the VR system. For beginners, the ease of use allows for creating complex animations with little to no experience, while animation experts benefit from the increased workflow speed for creating previsualizations and animated storyboards.
Applying Multi-user Virtual Reality to Collaborative Medical Training
 Jonas Schild, Sebastian Misztal, Benjamin Roth, Leonard Flock, Thomas Luiz, Dieter Lerner, Markus Herkersdorf, Konstantin Wegner, Markus Neuberger, Andreas Franke, Claus Kemp, Johannes Pranghofer, Sven Seele, Helmut Buhler, Nadine Kutz, Rainer Herpers
Jonas Schild, Sebastian Misztal, Benjamin Roth, Leonard Flock, Thomas Luiz, Dieter Lerner, Markus Herkersdorf, Konstantin Wegner, Markus Neuberger, Andreas Franke, Claus Kemp, Johannes Pranghofer, Sven Seele, Helmut Buhler, Nadine Kutz, Rainer Herpers
Applied Interactive Realities, Hannover Univ. of Applied Sciences and Arts, Germany
Abstract: The EPICSAVE prototype allows multiple users to join a co-located virtual environment for paramedic training. The hardware setup consists of a two-user full-scale VR environment with head-mounted displays for two interactive trainees and one additional desktop pc for one trainer participant. The showcase demonstrates that Virtual Reality can be applied in vocational training regarding hardware quality. However, we need standards in important areas of interaction design such as navigation, interactivity, social interaction, and level of abstraction. Experiencing the prototype helps researchers and industry stakeholders to discuss future work towards developing VR training standards, and in general.
Water Flow Measurement Technology Assessing Spatial User Interaction in an Underwater Immersive Virtual Reality Environment
 Shogo Yamashita, Shunichi Suwa, Takashi Miyaki, Jun Rekimoto
Shogo Yamashita, Shunichi Suwa, Takashi Miyaki, Jun Rekimoto
The University of Tokyo, Japan
Abstract: We present a potential water flow measurement technology aimed at accessing human-computer interaction in underwater virtual reality (VR). This technology enables virtual objects in VR to react to the actual movements of water and haptic feedback by creating water flow in a swimming pool. These additions would enhance the illusion of immersion in underwater VR. Flow measurement can be realized by using tracer particles that are scattered in fluids. We propose transparent tracer particles that become invisible in water and polarization-based technologies that enable cameras to track particle movements.
Mobius Walker: Pitch and Roll Redirected Walking
 Tatsuki Yamamoto, Jumpei Shimatani, Isamu Ohashi, Keigo Matsumoto, Takuji Narumi, Tomohiro Tanikawa|, Michitaka Hirose
Tatsuki Yamamoto, Jumpei Shimatani, Isamu Ohashi, Keigo Matsumoto, Takuji Narumi, Tomohiro Tanikawa|, Michitaka Hirose
The University of Tokyo, Japan
Abstract: A redirected walking (RDW) techniques enable users to walk around infinite virtual environments (VEs) in a finite physical space. In previous studies on RDW, many researchers have discussed manipulations in the yaw direction, but few have tackled with redirection in pitch and roll directions. We propose a novel VR system, which realizes pitch and roll redirections and allows users to experience walking on the 3D model of Mobius Strip in the VE.
A Demonstration of FaceDisplay: Asymetric Multi-User Interaction for Mobile VR
 Jan Gugenheimer, Evgeny Stemasov, Harpreet Sareen, Enrico Rukzio
Jan Gugenheimer, Evgeny Stemasov, Harpreet Sareen, Enrico Rukzio
Ulm University, Germany
Abstract: Mobile VR HMDs enable users to experience virtual reality content in a variety of nomadic scenarios, excluding all the people in the surrounding (Non-HMD Users) and reducing them to be sole bystanders. This leads to a scenario where the HMD User experiences a sense of isolation and the Non-HMD Users a sense of exclusion. To battle these phenomena we present FaceDisplay, a modified VR HMD consisting of three touch sensitive displays and a depth camera attached to its back. This allows Non-HMD User to see inside the immersed users virtual world and enable them to interact via touch and gestures.
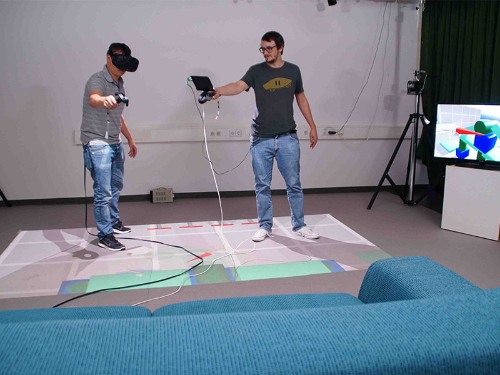
A Demonstration of ShareVR: Co-Located Experiences for Virtual Reality between HMD and Non-HMD Users
 Jan Gugenheimer, Evgeny Stemasov, Julian Frommel, Enrico Rukzio
Jan Gugenheimer, Evgeny Stemasov, Julian Frommel, Enrico Rukzio
Ulm University, Germany
Abstract: Most current virtual reality (VR) head-mounted displays (HMD) create a highly immersive experience and are currently becoming part of the living room entertainment (e.g. PSVR). However, current VR systems focus mainly on increasing the immersion and enjoyment for the user wearing the HMD (HMD user). This results in all the bystanders (Non-HMD users) in the living room being excluded from the experience and degraded to mainly observing the HMD user. In this demonstration we show ShareVR, a VR system using floor projection and mobile displays in combination with positional tracking to visualize the virtual world for the Non-HMD user.
A Demo of The Matrix Has You: Realizing Slow Motion in Full-Body Virtual Reality
 Michael Rietzler, Florian Geiselhart, Enrico Rukzio, Julia Brich
Michael Rietzler, Florian Geiselhart, Enrico Rukzio, Julia Brich
Ulm University, Germany
Abstract: We perceive the flow of time as a constant factor in the real world, but there are examples in media, like films or games, where time is being slowed down. Manipulating temporal cues is simple in linear media by slowing down video and audio. Interaction is a new aspect to consider in VR. We slow down the virtual representation of a user by applying a velocity based low pass filter and by visually redirecting the motion. We found such a manipulation to be even contributing to realism, enjoyment or presence as long as it is consistent with the experience.
Demonstration of Olfactory Display Based on Sniffing Action
 Shingo Kato, Masaaki Iseki, Takamichi Nakamoto
Shingo Kato, Masaaki Iseki, Takamichi Nakamoto
Tokyo Institute of Technology, Japan
Abstract: An olfactory display is a device which provides various scents to a user. To suppress the unnecessary odor emission and let an user receive comfortable amount of odor, we have developed a newly structured olfactory display based on the combination of SAW atomizer with micro dispensing valves. The odor delivery process is designed so the odor can go into the nostril only when the user sniffs it. We also developed a VR game using the device combined with head mounted display(HMD). The user can experience the clear change of scent through the developed VR game in this research demonstration.